
Using Large Language Models for Embodied Planning Introduces Systematic Safety Risks
FLASH: Fast Learning via GPU-Accelerated Simulation for High-Fidelity Deformable Manipulation in Minutes
Fast and Reliable Gradients for Deformables Across Frictional Contact Regimes
Few-Shot Neural Differentiable Simulator: Real-to-Sim Rigid-Contact Modeling
International Conference on Robotics and Automation (ICRA) 2026

Soft Responsive Materials Enhance Humanoid Safety
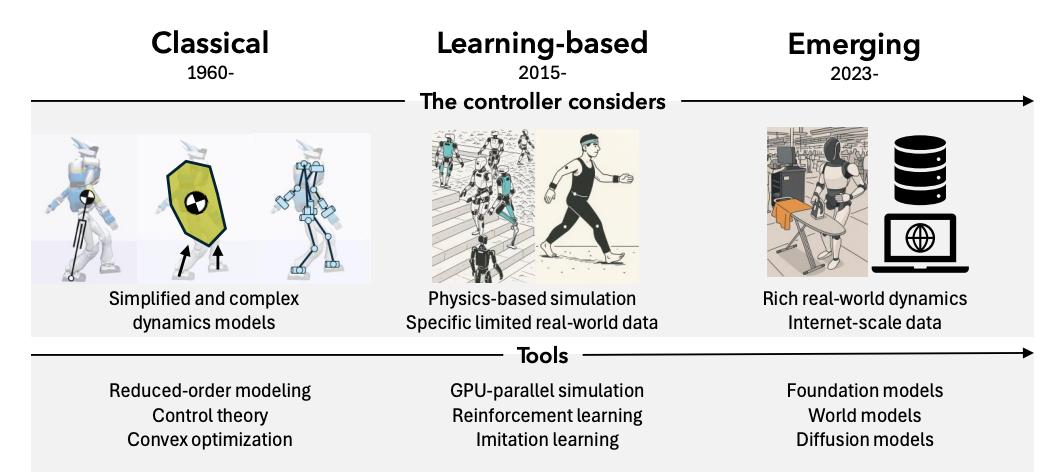
Evolution of Humanoid Locomotion Control
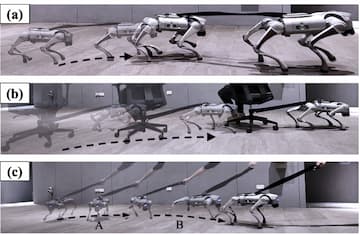
SAC-Loco: Safe and Adjustable Compliant Quadrupedal Locomotion
IROS 2026

REBot: Reflexive Evasion Robot for Instantaneous Dynamic Obstacle Avoidance
IEEE Robotics and Automation Letters (RA-L) 2025
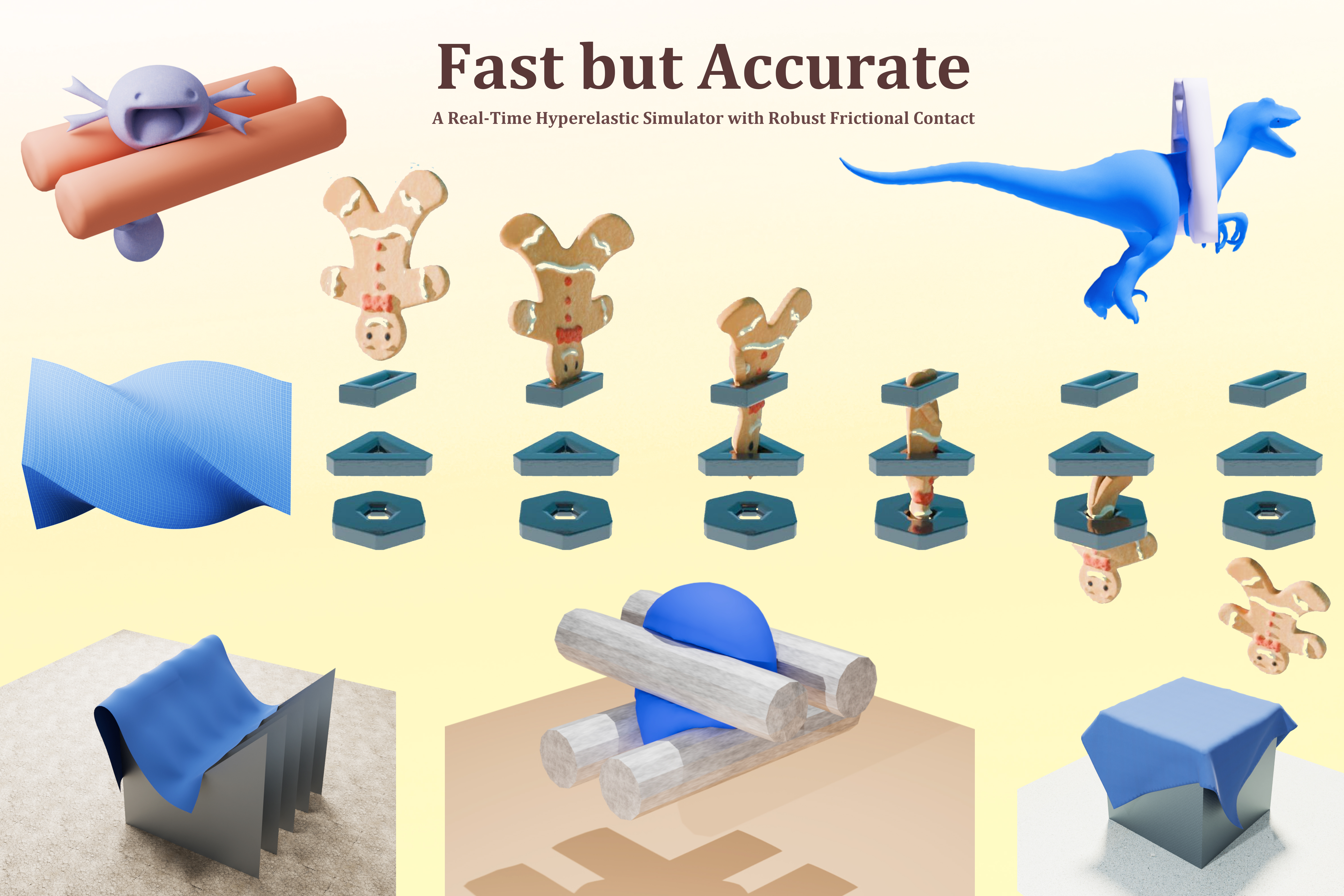
Fast and Stable Elastic Dynamics with Large-scale Contact Simulation
ACM SIGGRAPH Asia 2025 Posters
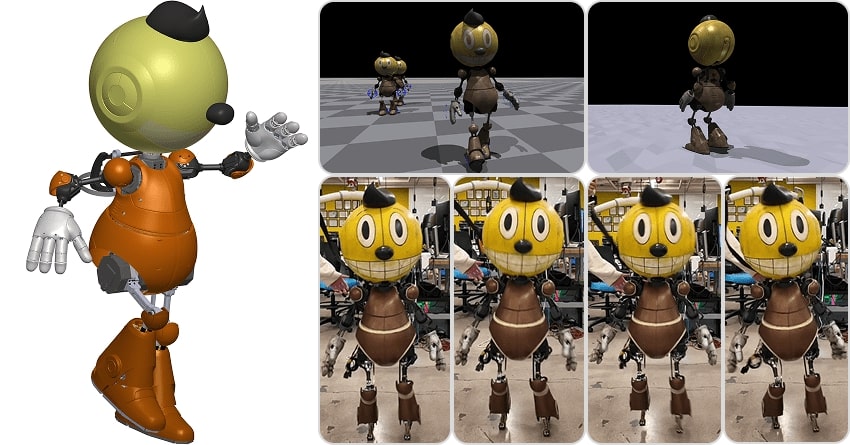
Learning to Walk in Costume: Adversarial Motion Priors for Aesthetically Constrained Humanoids
Humanoids 2025
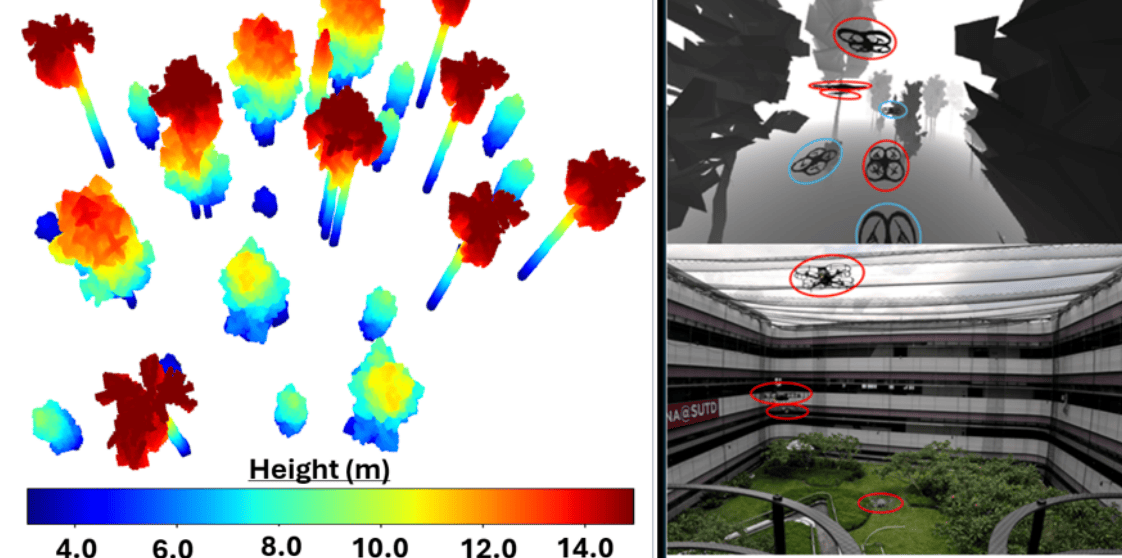
GO-Flock: Goal-Oriented Flocking in 3D Unknown Environments with Depth Maps
IROS 2025
SOFA++: A Real-Time GPU-based Surgical Robotics Simulator with Robust Frictional Contact
ICRA 2025 ELSR Workshop
Learning to Assemble with Alternative Plans
ACM Transactions on Graphics (Proc. ACM SIGGRAPH 2025)
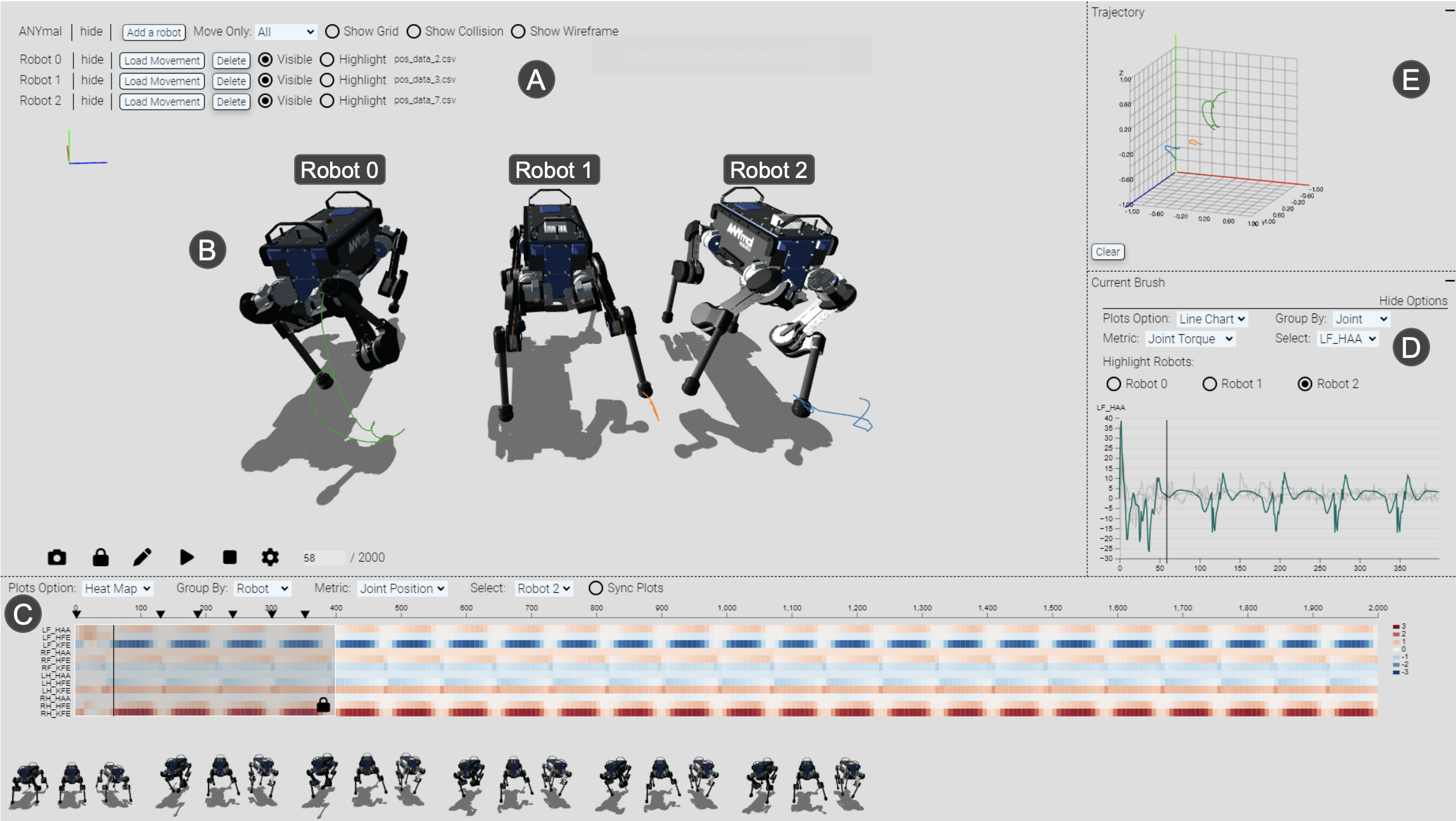
MRISA: A Visual Analytics Approach for Comparing Locomotion Policies in Robotics Training
Graphics Inferface 2025


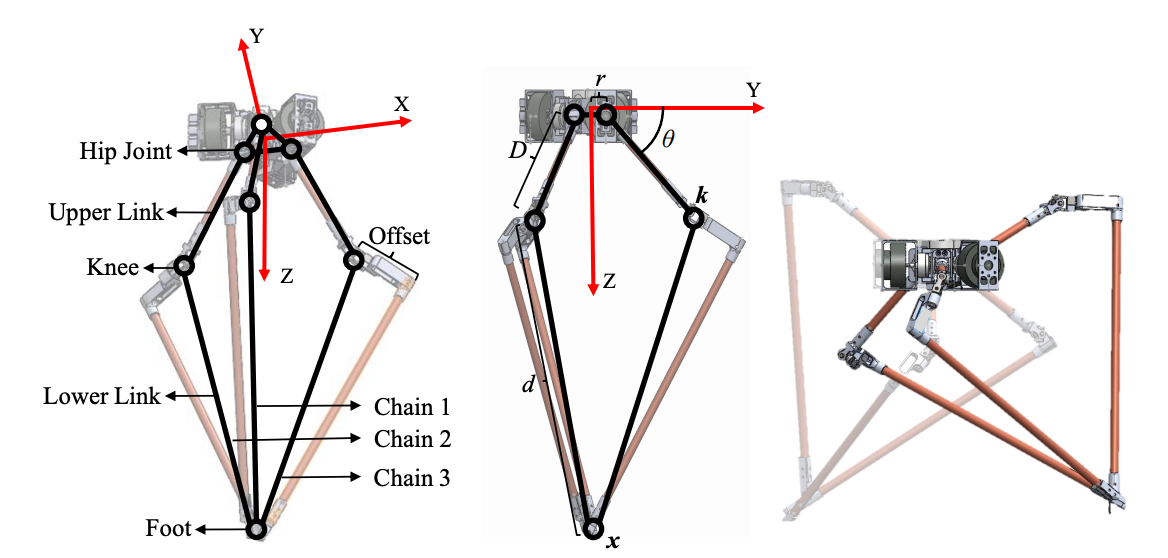
OMEGA: A Minimalistic 3D Hopping Robot with Parallel 3-RSR Mechanism for Safeguarding Humanitarian Demining
IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR) 2024
Rethinking Robustness Assessment: Adversarial Attacks on Learning-based Quadrupedal Locomotion Controllers
Robotics: Science and Systems (RSS) 2024
_______________________________________
Publications before 2024 can be checked here.